機智云開發板在線穩定性測試的詳細介紹
創作者:admin | 更新日期:2016-12-20 | 在線時長:77天
機智云Gokit2開發板,ESP8266刷AT固件后,使用基于ebox代碼在線穩定性測試。有教程有源碼。。。
創作者:admin | 更新日期:2016-12-20 | 在線時長:77天
機智云Gokit2開發板,ESP8266刷AT固件后,使用基于ebox代碼在線穩定性測試。有教程有源碼。。。
一、設備功能
機智云gokit開發板實時上傳DHT11溫濕度數據,接受控制并進行反饋,保持斷線重連,可以通過開發板的usb口,用串口工具調試工具,直接控制esp8266。

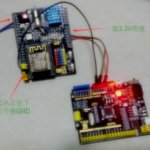
二、硬件
gokit開發板2.0v,esp8266網絡模塊。
三、實現方法
1、gokit擴展板上的esp8266刷AT固件,參見:機智云Gokit2代功能板ESP-12F直接刷AT固件透傳方法
2、下載基于ebox系統的stm32,工程文件,點擊下載;
3、復制下方代碼,粘貼替換下載工程文件中的mian.cpp文件內容;
4、修改文件中的DEVICEID、APIKEY、temp_input_id、hum_input_id,分別為設備id,設備密碼,屬于該設備下的溫度接口和濕度接口id;
5、編譯燒錄;
6、進行透傳設置,直接通過gokit的usb口,使用串口調試工具,向esp8266發送命令進行透傳設置,可參見:ESP8266透傳設置腳本,設置成功后自動連接貝殼物聯平臺 ,請透傳8282端口。
四、代碼
//STM32 RUN IN eBox
#include "ebox.h"
#include "cJSON.h"
#include "Dht11.h"
//================================
String DEVICEID = "xxx";
String APIKEY = "xxxxxxxxx";
String temp_input_id="xxxx";
String hum_input_id="xxxx";
//====================================
Iwdg dog;
Dht11 sensor(&PB3);
char uart1_rx_str[1024];
int i=0;
char uart2_rx_str[1024];
int j=0;
uint32_t last_beat_time = 0;
uint32_t last_say_time = 0;
bool checkinok = false;
String checkin="{\"M\":\"checkin\",\"ID\":\""+DEVICEID+"\",\"K\":\""+APIKEY+"\"}\n";
String checkout="{\"M\":\"checkout\",\"ID\":\""+DEVICEID+"\",\"K\":\""+APIKEY+"\"}\n";
void say(char *toID, char *content)
{
uart2.printf("{\"M\":\"say\",\"ID\":\"%s\",\"C\":\"%s\"}\n",toID,content);
}
int processMessage(char *msg){
cJSON *jsonObj = cJSON_Parse(msg);
if(!jsonObj)
{
uart1.printf("json string wrong!");
return 0;
}
cJSON *method = cJSON_GetObjectItem(jsonObj, "M");
char *m = method->valuestring;
if(strncmp(m,"b",1) == 0 || strncmp(m,"WELCOME",7) == 0)
{
uart1.printf("sending checkout...\r\n");
uart2.print(checkout);
//delay_ms(500);
uart1.printf("sending checkin...\r\n");
uart2.print(checkin);
}
if(strncmp(m,"checkinok",9) == 0)
{
checkinok=true;
}
if(strncmp(m,"connected",9) == 0)
{
checkinok=false;
uart1.printf("sending checkout...\r\n");
uart2.print(checkout);
//delay_ms(500);
uart1.printf("sending checkin...\r\n");
uart2.print(checkin);
}
if(strncmp(m,"checked",7) == 0)
{
checkinok=true;
}
if(strncmp(m,"login",5) == 0)
{
char *from_id = cJSON_GetObjectItem(jsonObj, "ID")->valuestring;
if(strncmp(from_id,"G",1) == 0)
{
uart1.printf("saying...");
char new_content[] = "Dear friend, welcome to BIGIOT !";
say(from_id,new_content);
}
}
if(strncmp(m,"say",3) == 0 && millis() - last_say_time > 10)
{
last_say_time = millis();
char *content = cJSON_GetObjectItem(jsonObj, "C")->valuestring;
char *from_id = cJSON_GetObjectItem(jsonObj, "ID")->valuestring;
if(strncmp(content,"play",4) == 0)
{
//do something here....
uart1.printf("saying...");
char new_content[] = "played";
say(from_id,new_content);
}
else if(strncmp(content,"stop",4) == 0)
{
//do something here....
uart1.printf("saying...");
char new_content[] = "stoped";
say(from_id,new_content);
}
}
if(jsonObj)cJSON_Delete(jsonObj);
return 1;
}
void uart2_rx_event()
{
uint16_t c;
c = uart2.read();
uart1.write(c);
uart2_rx_str[j]=c;
uart2_rx_str[j+1] = '\0';
if (c == '\n')
{
if(uart2_rx_str[j-1] == '}')
{
processMessage(uart2_rx_str);
}
if(strncmp(uart2_rx_str,"ERROR",5) == 0)
{
checkinok = false;
}
j=0;
}else{
j++;
}
}
void update_dht11()
{
int temp,hum;
switch (sensor.read())
{
case Dht11::OK:
temp=sensor.getTemperature();
hum=sensor.getHumidity();
uart1.printf("{\"M\":\"update\",\"ID\":\"%s\",\"V\":{\"%s\":\"%d\",\"%s\":\"%d\"}}\n",DEVICEID.c_str(),temp_input_id.c_str(),temp,hum_input_id.c_str(),hum);
uart2.printf("{\"M\":\"update\",\"ID\":\"%s\",\"V\":{\"%s\":\"%d\",\"%s\":\"%d\"}}\n",DEVICEID.c_str(),temp_input_id.c_str(),temp,hum_input_id.c_str(),hum);
break;
case Dht11::ERROR_CHECKSUM:
uart1.printf("Checksum error\r\n");
break;
case Dht11::ERROR_TIMEOUT:
uart1.printf("Timeout error\r\n");
break;
default:
uart1.printf("Unknown error\r\n");
break;
}
}
void uart1_rx_event()
{
uint16_t c;
c = uart1.read();
uart1_rx_str[i]=c;
uart1_rx_str[i+1] = '\0';
if (c == '\n')
{
uart2.printf(uart1_rx_str);
i=0;
}else if(strncmp(uart1_rx_str,"+++",3) == 0)
{
uart2.printf(uart1_rx_str);
i=0;
}else
{
i++;
}
}
void setup()
{
ebox_init();
uart1.begin(115200);
uart2.begin(115200);
dog.begin(10000);
uart1.printf("Working start!\r\n");
uart1.attach(uart1_rx_event,RxIrq);
uart2.attach(uart2_rx_event,RxIrq);
}
int main(void)
{
uint32_t last_update_time = 0;
uint32_t last_status_time = 0;
setup();
while(1)
{
if(millis() - last_update_time > 6310 && checkinok)
{
update_dht11();
last_update_time = millis();
dog.feed();
}
if(millis() - last_status_time > 120000 || last_status_time == 0)
{
uart2.printf("{\"M\":\"status\"}\n");
last_status_time = millis();
}
}
}